技术论文
成员自2015年以来
自1976年以来,雅马哈提供给工业市场装配机器人,无与伦比地提供有效载荷,速度和可靠性。机器人产品系列是雅马哈植物和全球成千上万的植物和数千人经验的高潮。雅马哈提供各种单轴型号,提供高达4000毫米的旅行,最大有效载荷为160千克和+/- 0.005毫米可重复的精度。此外,还提供广泛选择的斯卡拉型号,达到120毫米至1200毫米,最大有效载荷为50千克。雅马哈机器人能够在许多配置中提供笛卡尔系统,以及独特的2轴YP高速拾取和放置模型。Yamaha Robotics为Siemens,综合软件和3D CAD文件提供Allen Bradley PLC和功能块(FB)提供无缝附加说明(AOI),以简化设计和安装。Yamaha可以为几乎任何自动化装配要求提供最佳解决方案。
内容提交:
行业:
其他其他
应用程序:
其他其他
在PLC中创新小型装配机器人集成概念
发表于07/13/2016
作者:Chris Elston,高级控制工程师
 介绍
介绍
多年来,可编程逻辑控制器(PLC)仍然是控制,自动化和设计工程师选择的工业控制器。PLC通常被称为“主”控制器,其序列主逻辑并管理自动化设备上的网络数据。它们被认为是隐藏的“劳动力”,默默地执行封闭的电气柜门后面的梯形逻辑指令。然而,PLC通常不会在自动化机器上单独安装或集成。第三方产品通常用于补充PLC,例如伺服电机,视觉系统,测试设备或机器人。这些互补设备被称为与自动化系统相处的“从属”组件,并由PLC控制主/从关系。
 概念上,第三方设备的集成包括谨慎的接线I / O在PLC和第三方控制器之间握手信号。随着技术的发展,现场总线成为主PLC与其从设备之间的内存映射的连接和共享的集成方法。即使在这个级别,数据交换的概念也可以以各种设备单独处理或单独管理的方式,使用每个设备的配置或编程软件进行单独处理。PLC有一个编程软件套件,必须由工程师学习,以及其他第三方软件来编程和配置将连接到主PLC的从设备。集成主设备和奴隶设备的“旧学校”方法一直是工业自动化的事实标准。这需要在PLC制造软件中编写梯形逻辑的工程师编写代码。然后,软件代码必须彼此交互,通常称为“软件握手”。多年来,在多个设备之间写定制握手软件已经繁琐。当工程师想要集成另一个第三方设备时,必须通过并调试编写自定义代码的整个过程。大多数工程师都有这个思想过程在他们的思想中,关于如何序列和互锁单独的控制器,成为一定的标准心态。
概念上,第三方设备的集成包括谨慎的接线I / O在PLC和第三方控制器之间握手信号。随着技术的发展,现场总线成为主PLC与其从设备之间的内存映射的连接和共享的集成方法。即使在这个级别,数据交换的概念也可以以各种设备单独处理或单独管理的方式,使用每个设备的配置或编程软件进行单独处理。PLC有一个编程软件套件,必须由工程师学习,以及其他第三方软件来编程和配置将连接到主PLC的从设备。集成主设备和奴隶设备的“旧学校”方法一直是工业自动化的事实标准。这需要在PLC制造软件中编写梯形逻辑的工程师编写代码。然后,软件代码必须彼此交互,通常称为“软件握手”。多年来,在多个设备之间写定制握手软件已经繁琐。当工程师想要集成另一个第三方设备时,必须通过并调试编写自定义代码的整个过程。大多数工程师都有这个思想过程在他们的思想中,关于如何序列和互锁单独的控制器,成为一定的标准心态。
 工程师集成的痛苦程度
工程师集成的痛苦程度
这种旧方法的问题是工程师的痛苦点,因为他们必须不断学习新的第三方软件包,或参加供应商培训研讨会,以适当地为第三方设备写入软件。在一个要求从自定义机器集成商中需要大量时间的行业,工程师根本没有时间了解新的第三方设备。这对于潜在的初次用户来说是一个大的威慑力量。由于了解从设备如何与现有的PLC系统进行了解,他们涉及涉及的学习曲线,它们不愿意尝试新供应商。这种痛苦水平在项目范围内创造了额外的成本,因为工程师被迫学习新的软件设备,直接影响项目中引用的工程时间。
在过去十年中,现场总线已经在主PLC和第三方从站之间共享软件内存映射。如今,逻辑概念仍然认为,当第三方从设备有以非标准梯形逻辑格式编写的代码时,逻辑概念仍然写入序列以序列自动化机器上的主控制。然而,这取决于设备的操作是什么样的处理辅助过程。在某些情况下,第三方设备以结构文本语言集编写,必须将其视为独立进程。必须编写这些软件子系统以独立于主PLC架构行动。因此,学习的疼痛程度生效,因为工程师必须学习如何在这些第三方设备中编写代码,这些装置通常以与主PLC梯形逻辑标准相同的方式编码。此信息交换通常是从梯形图RING中的主PLC中设置的单个比特级标志,这指示从设备“GO”或“开始”它们的辅助过程。此时,PLC中的梯形序列必须等待来自指示其过程的第三方设备的确认位。这是一个低水平的数据交换,并且一旦其任务完成,提取的信息就会模糊。随着自动化和技术在多年来发展中,在预防生产中的失败或记录统计数据方面,需要共享有关第三方流程控制的详细信息的需求已经更加苛刻。 Because of simple mapping concepts of the bit level exchanges, it can be difficult to extract the scientific data of actual results from third party processes to and from a PLC’s memory mapping exchange only.
 机器人控制的新概念
机器人控制的新概念
如何改变“这就是我们如何从PLC控制第三方控制器的方式?”例如,使用机器人控制器,如果有一种方法,您可以将第三方设备直接控制到PLC梯形逻辑?这种类型的控制方法将是控制方案中的不同概念或方法。通过创建与机器人控制器直接通信的功能块,它简化了多个设备之间的集成握手,例如PLC和第三方控制器。如果您可以简单地使用单个梯形逻辑功能块移动机器人移动,这将解决集成的所有问题,消除学习其他软件包的挫折。
艾伦布拉德利主要的PLC制造商之一,随着基于标签的PLC,提供了供应商创建名为“添加指令”或AOIS的控制功能块的能力。AOIS允许第三方供应商创建导入PLC的控件或功能块。但是,并非所有AOI都是平等的。已经创建了一些Aois,试图模仿旧学校集成概念。这些可以使其更容易与机器人控制器交互和集成,但是在指示机器人通过PLC移动移动机器人之前仍然必须在机器人控制器中写入代码。供应商如何提供AOIS将整合到一个新的级别?这是通过改变对简化机器人控制的东西的概念来完成的,其中PLC直接命令机器人,而无需在机器人控制器中学习或写入单行代码。提供PLC程序员可以在PLC软件中以综合方式控制其机器人的能力,从PLC软件和序列直接机器人运动从梯形图逻辑指令块中进行重大改进。这正是亚马哈机器人用RCX240控制器拍摄的方法,通过以太网/ IP连接到Allen Bradley PLC。
AOI块如何工作
在Yamaha RCX240控制器中,特殊固件从PLC梯形逻辑AOI块接受命令代码。它命令亚马哈机器人以相同的方式移动,好像机器人程序员使用结构化文本脚本写入亚马哈代码。特殊设计的AOI可以自动创建和生成命令代码,即RCX240控制器理解和解释。这些命令变为瞬时机器人操作。
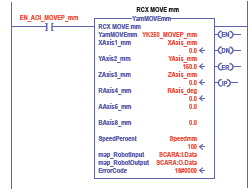 AOI块的设计目的是向行为类似于“API”应用程序编程接口的上层代码发送信息,以分解序列控制。AOIs接收程序员参数,指示机器人移动,改变参数设置,或发送信息到PLC时的要求。例如,如果在梯形逻辑中执行MOVEmm的PLC梯形AOI块,该块接收X、Y、Z和R值的直接笛卡尔毫米值以及“速度”参数。当梯子逻辑块变为“true”时,只有这些参数被发送给机器人控制器,控制器处理这些信息来处理运动命令,并将机器人从当前位置移动到3D空间中新指示的位置。通过梯形逻辑的顺序控制,PLC编程器可以用AOI块在工作单元内移动机器人。
AOI块的设计目的是向行为类似于“API”应用程序编程接口的上层代码发送信息,以分解序列控制。AOIs接收程序员参数,指示机器人移动,改变参数设置,或发送信息到PLC时的要求。例如,如果在梯形逻辑中执行MOVEmm的PLC梯形AOI块,该块接收X、Y、Z和R值的直接笛卡尔毫米值以及“速度”参数。当梯子逻辑块变为“true”时,只有这些参数被发送给机器人控制器,控制器处理这些信息来处理运动命令,并将机器人从当前位置移动到3D空间中新指示的位置。通过梯形逻辑的顺序控制,PLC编程器可以用AOI块在工作单元内移动机器人。
通常,现场总线通信协议用于在机器人控制器和PLC之间交换信息。在Allen Bradley的情况下,FieldBus协议的选择协议是以太网/ IP。可以使用其他现场总线选项,例如具有Siemens和GE PLC的Profibus,或CC-Link和Mitsubishi PLC。通过特殊块寄存器传送两个设备之间的I / O存储器映射的交换,即机器人响应于嵌入在Yamaha RCX240固件代码内的某些十六进制命令时。机器人控制器侦听这些寄存器并在正确序列中接收到某些代码时立即反应。此序列由工程师导入PLC项目的自定义AOI块管理。
例如,传统上,使用供应商软件包使用一种慢跑机器人的方法来教导机器人或伺服电动机位置,并将其位置教授到点地图存储区域。然后通过供应商软件编程语言回忆这些点以在自动工作单元中逐步排序机器人。使用AOIS,工程师可以通过教导吊坠和序列选择PLC梯形逻辑中的机器人运动作为一个选项。另一种选择是在基于标签的PLC中创建用户定义的存储器类型(UDT),其记录并存储PLC存储区域中的机器人或伺服电机的笛卡尔尺寸。通过直接访问PLC中的点数据,工程师可以使用任何预先存在的梯形逻辑来操纵或命令机器人到任何点,而无需将机器人的位置数据存储在机器人控制器中。这提供了特殊机器构建器或工程师为其机器设计精心设计的能力,以便能够直接在PLC中操作数据,以便机器人位置和机器人序列控制。
Aois在PLC编程软件环境中本身开发。在Allen Bradley的情况下,AOIS将创建为附加指令,即在RS Logix 5000软件中显示为附加功能块。该工程师使用PLC编程环境的内置功能将从工具栏中的指令块直接拖放到梯形逻辑中,就像机器人工具集是PLC软件套件的一部分。通过梯形图逻辑的机器人控制的概念可用于任何PLC软件,提供创建自定义功能块的功能。其他示例包括用于欧姆伦NJ系列PLC的Siemens或Sysmac软件的STEP 7软件。
 好处
好处
新控制哲学确定的福利:
- 没有额外的培训
- 不需要额外的机器人软件来学习
- 节省开发软件成本
- 多个第三方设备之间的易于集成
维护或工程人员不需要额外的培训。而不是学习另一个供应商软件包,机器人控制方法使用梯形图。大多数维护人员和工程人员通常已经熟悉PLC阶梯逻辑。他们在自己的设施中使用PLC或梯形逻辑舒适。他们在自动化应用程序中觉得有充分的使用,并且足够竞争于使用梯形图逻辑在结构文本或机器人编程环境中编写或编辑软件。
整合机器人的开发成本降低了多达20%至40%。此数字是由梯形逻辑中的机器人序列编程的早期采用者收集的数据的平均值。在所有梯形图逻辑中编程的机器人减少了软件集成时间,因为没有额外的学习曲线或要求将传统的PLC梯形逻辑写入PLC序列内的机器人序列。由于机器人可以完全控制在PLC中,因此单独的机器人控制器没有任何集成。机器人控制器仅需要提供电源和通过现场总线协议(例如以太网/ IP)交换数据的公共CAT5电缆。
预期的性能
通过现场总线控制第三方设备受到现场总线性能循环周期和PLC扫描时间的限制。对于以太网/IP,对于连接到主设备的每个从设备,典型的RPI(数据包间隔请求)是10毫秒。如果一个PLC通过现场总线命令一个运动控制设备,预期的性能可以从以下推导出来:(总线时间+ PLC扫描时间+从设备响应)=总预期响应。这些性能水平可能取决于几个变量;然而,使用Allen Bradley和以太网/IP,标准的Compactlogix PLC和雅马哈RCX240控制器之间的命令响应大约是20到30毫秒。严格设计的运动控制器,如机器人控制器通常有一个典型的扫描和执行时间的2到3毫秒断开执行运动命令从书面文本结构程序相比,运动的命令从梯子逻辑PLC抵达大约20到30毫秒断开。
结论
提供了一种在PLC内部以梯形逻辑编写序列逻辑的新方法,为自动化软件工程师提供了灵活性。利用一个控制工厂自动化的强大平台,并在同一个开发平台中共存,可以方便地在多个控制器平台之间进行信息交换。在梯形逻辑软件环境中开发减少了人员学习额外软件语言所需的培训。大多数维护自动化设备的工程师和技术人员已经对阶梯逻辑环境中的排序自动化软件有了基本的了解。通过减少所需的培训数量,这为信奉新控制神话的公司节省了培训成本。为运动控制编写阶梯逻辑序列并不少见,因为罗克韦尔自动化提供了Kinetix运动架构,利用相同的典型使用运动功能块在自动化机器上移动伺服电机。在设计定制机器时,将SCARA机器人或360度零盲点到达机器人引入自动化功能,可以更容易地集成更小的机器人驱动器。
关于雅马哈机器人
雅马哈机器人拥有超过三十年的制造商机器人到工业的经验
市场。在有效载荷、速度和可靠性方面无人能及,雅马哈机器人公司的机器人解决方案将有所帮助
你可以节省时间并消除风险。
- 多功能、可靠和经过验证的机器人解决方案已在雅马哈自己的工厂和世界各地的数千家其他工厂中使用。
- 为几乎任何自动化装配要求提供各种单轴和多轴笛卡尔机器人的选择。
- 在密封,点胶,实验室测试,螺栓和螺母紧固,输送机跟踪,码垛,和材料处理方面的性能得到证明。
- Yamaha机器人的非凡寿命,提供了任何其他机器人制造商无与伦比的投资回报。
所有Yamaha产品和服务都旨在提供长期节省,以提高您的盈利能力。