新闻
成员自2018年以来
Robodk是一种强大而经济高效的模拟器,适用于工业机器人和机器人编程。从50个不同的机器人制造商模拟超过500个机器人武器!直观的Robodk图形界面不需要编程技能。了解更多https://robodk.com/
下内容提交:
行业:
机器人机器人
应用程序:
N/A
它是如何运作的:Robodk的新PRM Motion Planner
发表于05/30/2019.
我们的最新功能- RoboDK PRM运动规划器-允许您在触摸一个按钮创建人工智能驱动的机器人轨迹。但是它是如何工作的呢?
我们并不总是拥有一个干净、自由的工作空间,不是吗?对于我们个人的工作空间来说也是如此(例如,我的办公桌上布满了不必要的物品)。机器人的工作空间也是如此。
有时机器人的工作空间比我们计划的更小。有时,工作空间中间有一个巨大的柱子,我们无法摆脱。有时,有一堆盒子无法存储在其他任何地方。
每当有机器人可能与工作空间中的某些东西碰撞时,我们的新动议计划就会让您的生活更轻松。
通过触摸按钮,它可以为机器人程序创建无碰撞路径。
本文介绍了PRM运动规划,并解释了何时应该使用这个新特性。
prm是什么意思?
新的RoboDK运动规划器使用一种名为“PRM”的算法,即“概率路线图”。这是一种非常常见的运动计划器,原因我们一会儿会讲到。
有一堆可用于机器人的不同运动规划算法,从非常基本到极其精心的复杂性。如果您根本不熟悉运动规划师,请查看我们之前的文章回到基础:机器人运动规划很容易
这是PRM的手段:
- p =概率 -“配置空间”中的点(即计划者用于知道机器人在其工作空间中可以移动到其工作空间中的一组点)被规划器选中。这种随机放置称为“概率”。替代方案是一个“统一”放置,其中在整个工作空间中以规则的间隔放置点。
- 路线图-PRM算法首先创建整个机器人工作空间的“路线图”。该地图类似于智能手机上的GPS方向使用的映射。它可能需要一段时间才能首先生成此地图,但一旦生成它,您无需再次计算它,因此您可以更快地“查询”地图。
从这两个术语,我们可以对PRM运动规划器说:
- 它总能找到可行的机器人轨迹(如果存在的话)。
- 它可以节省配置空间的路线图,以加快“查询”阶段。
这是PRM规划师受欢迎的两个原因。
PRM如何工作
与一些运动规划者不同,PRM算法将他们的工作分为两个独立的阶段。在使用RoboDK中的规划器之前,您必须设置一些属性。
设置阶段
在运行策划器之前,有3个属性在运行之前手动设置。
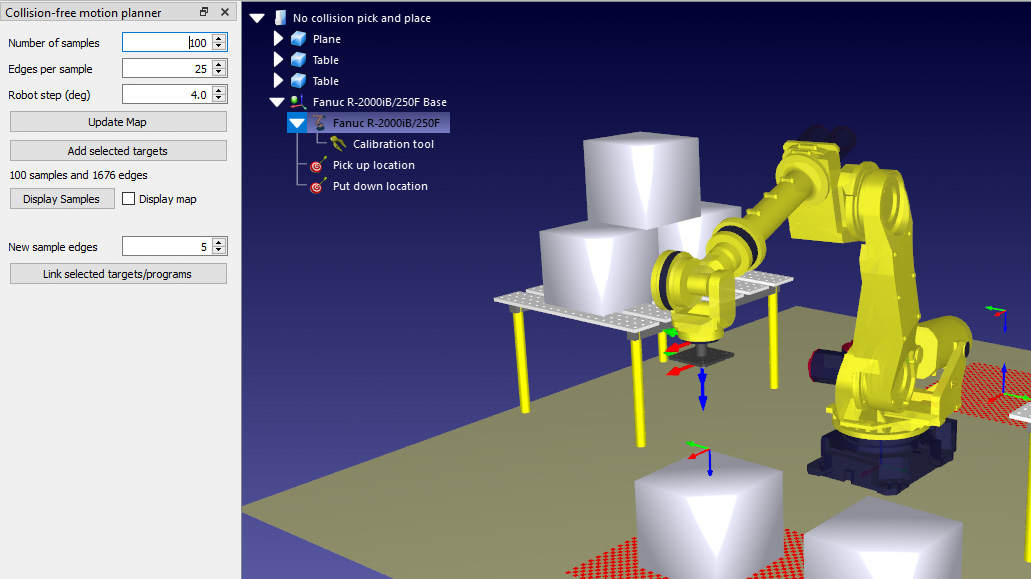
这就是您在Robodk中设置这些属性的情况(以及它们的意思):
- 样本数目-在构建阶段,您可以选择一些“样本”,规划者将这些“样本”放置在机器人工作空间周围。更少的样本意味着更快的构建阶段,但是路线图更粗糙。
- -每个样本的边数每个样本都有一个最大的“边”数。每条边将两个样本连接在一起。同样,更少的边界意味着更快的构建阶段,但路线图更粗糙。
- 机器人步长(deg) -当PRM算法运行到施工阶段时,每次都会将机器人移动一小段距离。这个距离由机器人的步长定义。一个更大的步骤意味着一个更快的建设阶段,但有更多的机会规划师将未能注意到潜在的碰撞。
然后单击“Update Map”开始构建阶段。
第1阶段:建筑(慢)
计划的第一阶段是生成路线图。这可能需要很长时间(100个样本,每个样本25条边,大约需要15-30分钟)。

这就是施工阶段的作品如何“在引擎盖下”:
- 规划器将一个“样本”放置在机器人工作空间中某个自由空间的随机位置。
- 然后,该算法测试该样本与周围样本之间的路径。它通过“机器人步”移动机器人沿着路径,并检查碰撞。如果路径是自由的,它会将路径作为“边”添加到路线图中。
- 当规划器达到此样本的最大边数时,它将移动到下一个样本。
您可以看到为什么这个阶段需要很长时间——算法有很多样本需要测试。幸运的是,一旦创建了地图,您就不需要再次计算它(除非您向环境中添加了新对象)。
阶段2:查询(快速)
查询阶段是您最常使用的运动规划的一部分。您将计划员提供两个目标(启动目标和终端目标)。然后,规划器尝试使用其存储的路线图试图在它们之间创建无碰撞轨迹。
这就是这一阶段如何工作“在引擎盖下”
- 您选择两个目标并告诉计划员“链接”它们。
- 如果尚未添加到路线图中的任一目标,则计划程序将其作为新示例添加,并在新位置和附近的现有样本之间创建一组边缘。
- 然后,计划者使用其路线图来找到两个目标之间最短距离的路径。

有了足够详细的路线图,您只需按一下按钮,就可以在几秒钟内创建复杂的、无碰撞的机器人运动。
我应该什么时候使用运动计划?
将一个动作编程到RoboDK的标准方法是手动规划你自己使用的动作关节运动,线性运动或循环运动。这仍然是让机器人在两个目标之间移动的最快方法。
但是,这些标准命令仅在两个目标之间存在空闲空间时工作。如果途中有对象,您可能需要花费大量时间来创建中间目标以避免碰撞。
运动规划器提供了一种实现这一过程自动化的方法。它会自动找到最佳的运动组合,让机器人在目标之间不发生碰撞。
但是,有一个折扣。在规划师可以开始为您寻找路径之前,您必须等待很长时间才能完成施工阶段。
大多数时候,这种长时间的等待不是问题。你只需要“设置它,然后忘记它。”在您做其他事情的时候,让构建阶段运行。
检查文档有关如何开始的更多详细信息。