社论
成员自2018年以来
RoboDK是一款功能强大、性价比高的工业机器人和机器人编程模拟器。模拟来自50个不同机器人制造商的500多个机器人手臂!无需编程技能,直观的RoboDK图形界面。https://robodk.com/了解更多
内容提交:
工业:
机器人机器人
应用:
仿真/ 3D建模仿真/ 3D建模
工业机器人最好的东西是什么?
发布01/07/2020
| By: Alex Owen-Hill
机器人的“到达”将确定许多其他因素,例如,你的工件尺寸,需要外轴等。但是你最好的东西是什么?
让我们说你有一个想要自动化的任务。你知道你想使用一个工业机器人,但你不确定哪种品牌或型号是最好的。您如何选择市场上许多不同的型号?
我们有一个目录,里面有几十个品牌的数百种机器人模型。我们经常需要为客户项目选择合适的模型,或者只是为了制作教程。
我们如何在所有不同的机器人之间进行选择?
在选择机器人时,我们首先要考虑的特性之一是它的“触及范围”。这个机器人的基本属性几乎影响到应用程序设计的每一个方面。
例如,机器人的范围将确定:
- 你的工件能有多大。
- 是否需要使用外轴。
- 你可以把机器人放在你的工作台上。
- 在这之后的所有决定…
但是,机器人的范围是什么,你如何确定最好的?让我们找出答案。
机器人的触角有多大?
顾名思义,机器人的“REACH”是一种衡量机器人手臂在完全被伸出时可以到达的尺寸。换句话说,它定义了机器人工作空间的限制。
值得注意的是,reake只是机器人工作空间的粗略衡量标准。对于机器人在一个方向上比另一个方向达到更多的机器人是非常常见的,这在该参数中没有反映。然而,触及确实给了我们一个关于机器人大小的一般概念及其运动能力。这就是为什么它是在挑选机器人模型时使用的有用的第一个参数。
距离由机器人的各种物理因素决定,包括:
- 连杆的长度。
- 机器人的整体大小。
- 关节的范围(带有低运动范围的接头,即使机器人也很大)即使机器人也很低)。
哪些机器人拥有最大,最小的覆盖范围?
如果您要选择适合您任务需求的达到价值,首先需要了解上下限制。
在过去,工业机器人的尺寸之间存在相当小的变化。然而,这些天有一个大幅度。您现在可以找到那么小的机器人,他们可以适合手掌,机器人如此之大,他们可以抬起1.5吨汽车。数百种机器人模型位于我们的机器人库中,以便与Robodk一起使用。
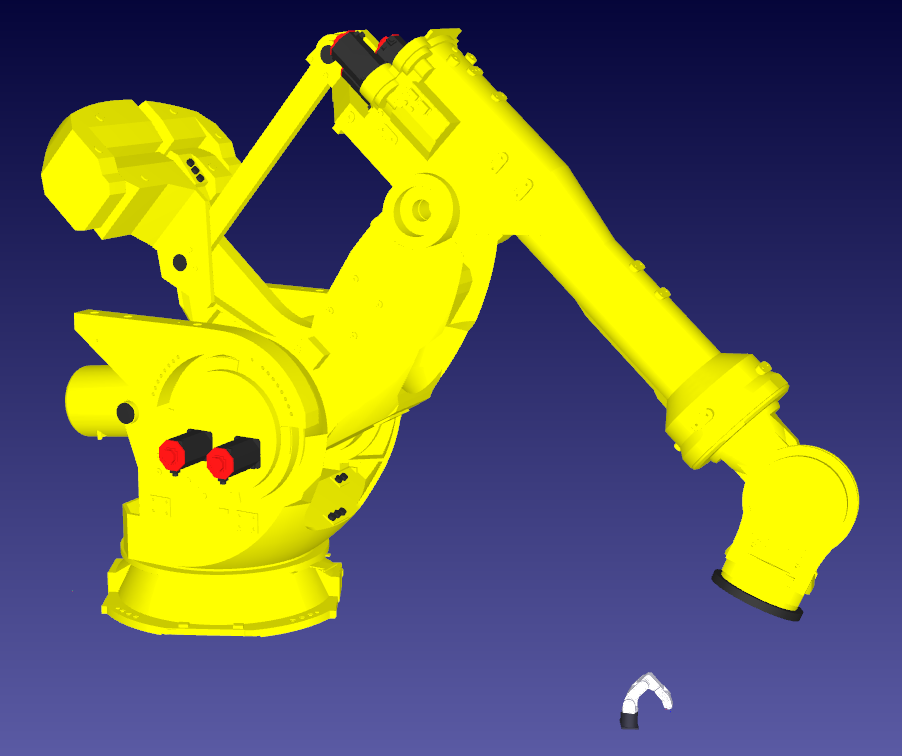
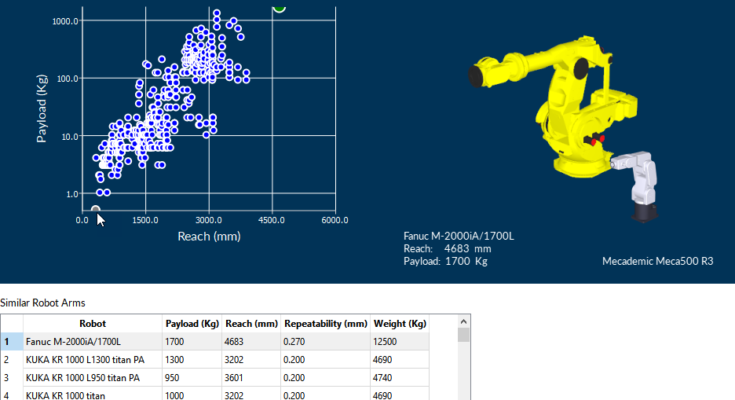
最大覆盖范围:发那科M-2000iA/1700L
我们图书馆中最大的机器人(撰写本文时)是来自发那科的巨型M-2000iA。
它的性质是:
- 到达:4683毫米
- 有效载荷:1700公斤
- 体重:12500公斤
- 可重复性:0.270毫米
这种机器人长4米,重达12吨,最适合执行涉及非常重的有效载荷的大型任务。
最小覆盖范围:Meca 500r3
我们图书馆中最小的机器人(撰写本文时)是Meca 500。
它的性质是:
- 达到:330毫米
- 有效载荷:0.5千克
- 重量:4.5千克
- 可重复性:0.005毫米
在规模的最小末端,只有几百毫米的达到达到,这个微小的机器人在桌面应用程序上是针对的。这种小尺寸还允许它非常精确 - 在写作时具有6 DOF机器人的最低可重复性值。
查看我们的工业机器人触控工具
我们有一个互动工具,显示“通过达到的工业机器人武器”。有了它,您可以快速跳转到最适合您在我们图书馆的所有机器人中的任务最适合您的任务。
为您的任务挑选最佳范围的5个步骤
通过机器人模型的所有诸多选项,决定哪个覆盖范围最适合您的任务是什么?
以下是您可以使用的5步选择过程:
1.确定任务需求
首先,查看您想要自动化的任务,并清楚地概述所需的内容。
确定机器人单元的布局,并确定你的产品通过它的路径。从这些信息中,您可以开始了解机器人完成任务所需的属性,包括所需的可达范围。
2.选择重要规格
并非所有机器人规范都对您的任务很重要。例如,拾取和放置任务一般不需要高精度,因此机器人的可重复性并不那么重要。如果空间有限或工件很大,机器人的大小(在其覆盖范围内反射)将是至关重要的。
3.寻找一个合适的机器人
根据任务需要,确定机器人关键规格的粗略值(即到达距离、有效载荷、重量和重复性),并按重要性列出它们。然后,用我们的触控工具选择一个需要触控的机器人。
记住,你的任务所要求的距离和机器人的距离是不一样的。让机器人的活动范围比你需要的要大,这几乎总是一个很好的策略,因为许多机器人在工作空间的边缘不太灵巧。
4.找到类似的机器人
当您找到合适的机器人时,查看具有类似规格的机器人。
您可以使用两种方式:
- 使用我们的交互式机器人比较图来比较不同的属性。
- 使用机器人库中的过滤器来查找具有类似属性的机器人。
5.比较和决定
您可能最终会有几个适合您任务的机器人。比较它们的好方法是在Robodk内尝试它们。
为您的任务构建一个虚拟模型,并测试几个不同的机器人。你应该很快就能知道哪种机器人最适合你的任务。